1、行業背景
核電站的升壓站需要日常維護和管理,傳統的人工定期巡視模式面臨局限和挑戰,比如關鍵設備需要專人24小時值班巡檢、人員安全健康、數據的智能化分析和預警等等,使電力運維人員工作更加繁瑣重復。
核電站的升壓站傳統巡檢方式存在諸多挑戰。一方面是設備數量繁多、巡檢內容要求準確,人員巡檢難以長期按照實際巡檢巡查的業務需求進行全面運維覆蓋。另外一方面就是缺少提前預測,只有在異常發生后,業務人員才能“事后響應”,從而部分釀成事故。最后就是缺乏統一調度,電站巡檢多依賴人工定時檢查與駐點值守,然而人工巡檢難以收集全面有效數據,諸如設備溫度、匯控柜指示燈、設備壓力表與電流表數值、開關狀態等情況,若無法及時察覺并處理異常,易引發更大問題,造成較大經濟損失。

2、機器人解決方案
2.1智能巡檢系統概述
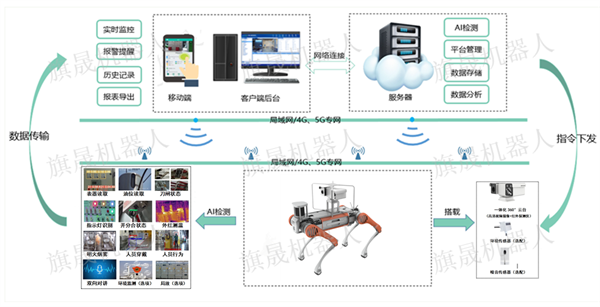
整個智能巡檢系統主要由機器人本體、充電系統、通信網絡系統、機器人控制系統、巡檢平臺軟件系統構成。通信網絡系統依項目場地實際情況設計安裝,實現對網絡項目場地待巡檢對象的全面覆蓋,機器人接入網絡進行巡檢。機器人本體搭載的高清可見光攝像機、紅外熱成像儀、環境及氣體傳感器(選配)對待巡檢對象進行數字表讀數記錄、指示燈狀態、位置狀態識別、溫濕度檢測、以及機器人所處位置的局部環境監測。軟件系統全部運行于機器人內置的高性能服務器上,采用模塊化分層設計,架構清晰外部接口齊備。機器人本體涵蓋了本體的運動控制、各傳感器的接入與數據采集;設置在后臺控制室的服務器負責機器人狀態監控、任務調度、圖像識別、巡檢數據的匯總、計算、分析、告警判斷等業務邏輯處理;客戶端采用B/S架構,實現跨平臺統一的用戶交互,同時提供接口可與外部系統的數據交互。通信網絡系統為機器人提供網絡環境用于數據傳輸,充電樁為機器人提供自主充電設備。
2.2四足巡檢機器人
旗晟四足巡檢機器人通過高度智能的機器人技術和圖像識別等技術,代替人工完成特殊環境下設備運行狀態的檢測診斷,實現設備區域全覆蓋巡視,具有巡檢、環境監測、圖像識別等多種功能。主要應用于各類環境中,利用自身攜帶的雙目云臺相機、供電單元、行走底盤、定位導航各單元組成,輔助人工甚至替代人工對設備和當前環境進行檢測。有效的減輕工作人員的勞動強度,避免因人員疏忽、漏檢等帶來的損失,同時降低由生產運行人員整體素質差異而導致的安全生產運行風險。機器人在發生異常時,能夠快速預警,為事故處理提供初步初步參考,有效的保障機房環境情況,提升工作效率跟質量。

2.2四足巡檢機器人功能
2.2.1智能巡檢能力
四足巡檢機器人具備定時、定點、指定任務臨時、遙控等多種巡檢方式。常用的定點巡檢,設定好路徑與目標點后,可自動勻速巡檢,啟動后無需人為操作,每到一處自動停車探測,按路徑前往下一點,完成巡檢作業,并自動記錄保存采集數據。其巡檢任務模式涵蓋全面巡檢、表計讀數、紅外測溫、注油設備油位、開關分合位置等作業。
2.2.2檢測功能功能
四足巡檢機器人具有可見光攝像機、紅外熱成像儀和拾音器等檢測設備,并能將所采集的視頻和聲音上傳至監控后臺。標配可見光攝像機、紅外熱成像儀和拾音器,并可靈活選配溫濕度、氣體、噪音、超聲、局放、紫外等檢測設備。
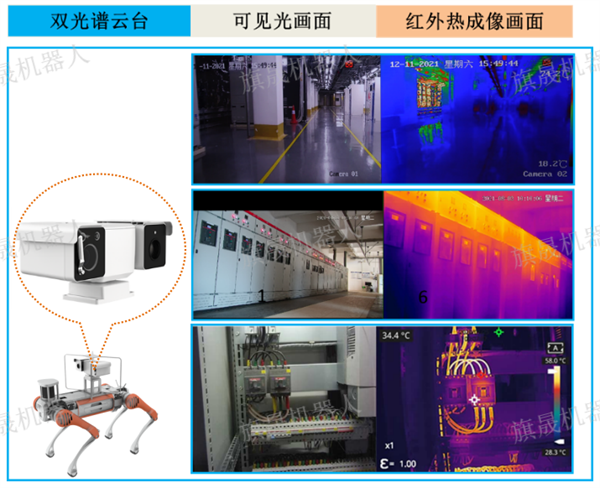
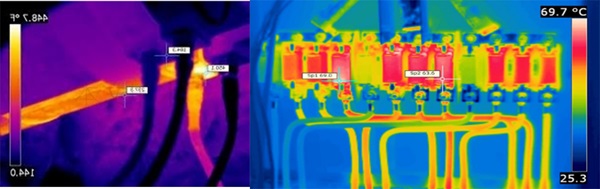
2.2.3測溫功能
變電站設備易超高溫運行,為防事故,智能四足巡檢機器人需具備溫度采集功能。它可隨時通過車載紅外熱像儀,對變電站內指定或全部運行設備接頭溫度進行測量。當檢測到設備溫度超設定值,機器人自動報警,方便工作人員實地查看并處理。四足巡檢機器人移動靈活,溫度采集可覆蓋站內相關設備,能測量低檔測溫設備測不到的點。
2.2.4機器視覺識別功能
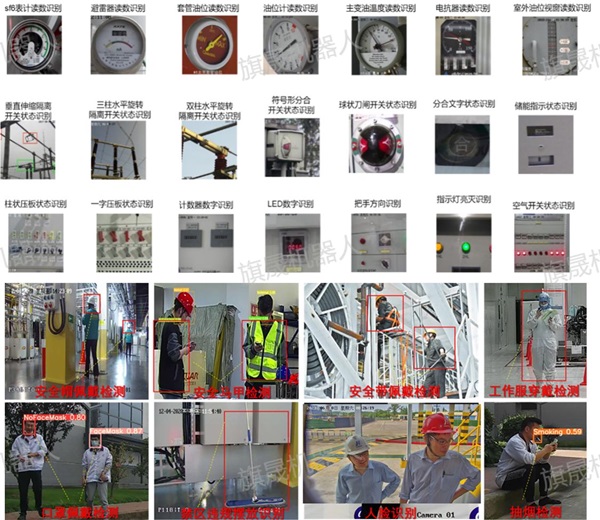
對有讀數的表盤進行數據讀取或者對于開關的位置進行監測(例:注油設備油位表,開關分合位置)、自動記錄和判斷,并提出報警。
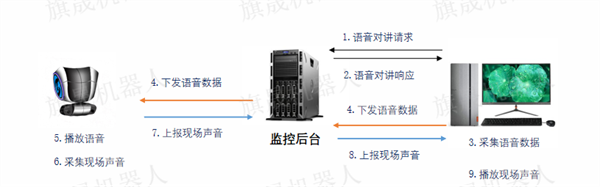
2.2.5雙向語音對講功能
機器人自身配備拾音及音響設備,并且遠程集控后臺也安裝麥克風及音響設備,通過變電站無線網絡及國家電網的專網實現廠站智能四足巡檢機器人和運維站遠程集控后臺完成遠程語音對講。
2.2.6報警功能
機器人的高清攝像頭可識別變電站各類GIS儀表讀數,一旦讀數超出正常范圍,機器人便發出聲光提示,并將報警信息上傳至服務器,且人工操作模式下可對該報警進行退出或恢復操作。同時,主控室工作人員能設定其高溫報警極限值,當機器人工作中檢測到某點溫度超限,會立即進行聲、光及語音報警,防止事故危及生命,相關信息還會存儲至數據庫,為后續事故處理提供依據,報警內容涵蓋區域絕對溫度和三相相對溫度測溫時超過極限值的情況。
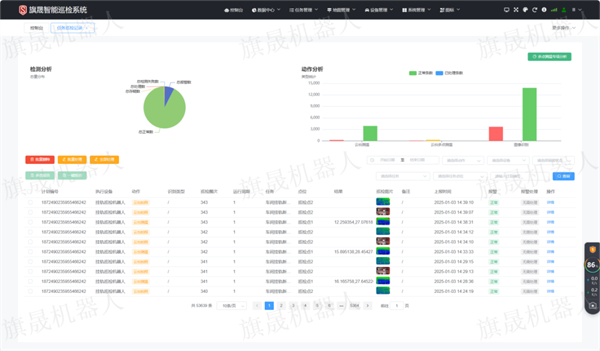
2.2.7報表功能
檢機器人作業時,通過無線網絡回傳圖像、視頻信息,自動記錄拍攝地點與時間。其管理軟件支持報表生成和日志記錄,工作人員可依不同關鍵字段生成報表,以多樣形式和分析方式助力判斷設備運行與預測性能。結合變電站實際,巡檢含可見光與紅外視頻巡檢、表計讀數等,能自動識別溫度并報警,分析設備歷史溫度。分析內容涉及溫度趨勢、同類設備溫度對比等,為設備檢修和狀態評估提供決策,實現設備運行狀態分析診斷。
3、四足巡檢機器人參數
站立尺寸 | ≦1098×450×645mm |
折疊尺寸 | ≦880×460×330mm |
重量 | ≦65kg |
續航能力 | 4~6h |
續航耐力 | 空載行走>5h, 里程>20km |
負載(站立) | 最大120kg |
負載(行走) | >40kg |
連續爬樓梯 | 20~25cm 的樓梯 |
攀爬能力 | 向前爬上和爬下40cm的臺階 |
工作溫度 | -20℃~55℃ |
爬坡角度 | >45° |
奔跑速度 | >6m/s(可調) |
跳躍寬度 | 0.5~1.2m |
最大跳躍距離 | >1.6m |
防護等級 | IP67 |
傳感傳感器 | 3D激光雷達×1+深度攝像頭×1+光學攝像頭×2(因配置不同而異) |
外部接口 | 1000M-Base-以太網×4、USB3.0×4、 |
四足巡檢機器人可以適用于電力行業中的開關室、配電間、升壓站、機房、繼保室、匯集站等場景

升壓站智能運維巡檢機器人的出現,為核電站升壓站運維帶來了全新的變革。從解決傳統巡檢的諸多難題,到通過智能功能實現設備的全面監測與精準預警,再到憑借可靠的參數性能適應復雜的工作環境,它的每一個特性都彰顯著技術的魅力與價值。我們有理由期待,在智能巡檢機器人的助力下,核電站升壓站的運維工作將更加安全、高效,為國家能源供應的穩定貢獻力量。