管廊、電煤棧橋等閉塞空間存在易燃易爆、有毒有害、高溫及高粉塵的復雜環境。稍有不慎就可能引發嚴重的安全事故,這使得巡檢工作成為必不可少的一項任務。

然而,傳統的人工巡檢方式不僅效率低下,還存在安全風險高、易漏檢誤檢等問題。為了解決這些難題,旗晟B1-111-A型雙圓管掛軌式巡檢機器人應運而生,以其獨特的設計、強大的功能和便捷的操作,為巡檢工作帶來了革命性的變化。
一、雙圓管設計,適應狹窄環境
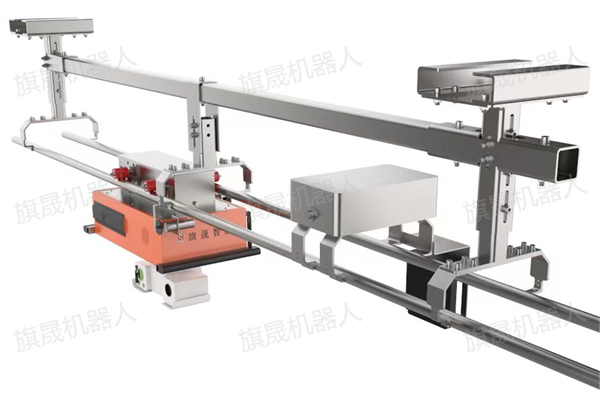
B1-111-A型巡檢機器人采用業內領先雙圓管軌道形式,這種設計使其能夠輕松適應管廊、輸煤棧橋等通道狹窄、高粉塵的復雜環境。小巧的外觀不僅便于部署,還減少了對現場空間的占用,使得巡檢工作更加靈活高效。
二、智能導航,精準定位
機器人搭載了編碼器+RFID導航系統,這一組合確保了機器人在全場景下的無死角巡邏檢查。通過高精度的定位技術,機器人能夠準確到達指定位置,執行巡檢任務,大大降低了漏檢和誤檢的可能性。同時,這一系統還具備強大的抗干擾能力,即使在惡劣環境下也能保持穩定的運行狀態。
三、實時監測,預警及時
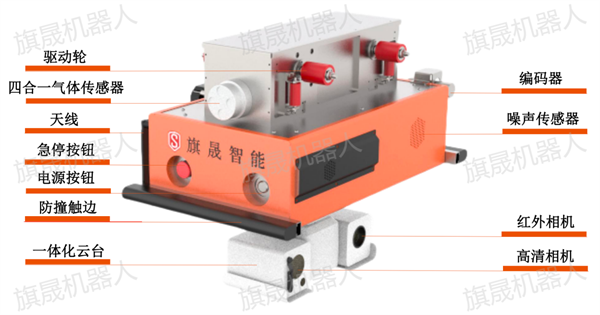
B1-111-A型巡檢機器人配備了多種傳感器和監測設備,包括氣體傳感器、噪聲傳感器、紅外相機和高清相機等。這些設備能夠實時監測環境參數和異常情況,一旦發現潛在問題,機器人將立即發出警報,并通過巡檢管理系統將相關信息傳輸給控制中心。這種實時監測和預警機制,使得管理人員能夠迅速響應,采取有效措施,避免事故的發生。
四、高效管理,遠程操控
機器人配備的巡檢管理系統實現了巡檢工作的自動化和智能化。通過該系統,管理人員可以方便地安排巡檢任務、查詢歷史記錄、管理用戶信息等。同時,遠程控制功能使得管理人員可以隨時隨地掌握機器人的工作狀態,輕松進行調度和指揮。這種高效的管理方式不僅提高了巡檢工作的效率,還降低了人工成本和安全風險。

五、自主充電,續航長
為了滿足長時間巡檢的需求,B1-111-A型巡檢機器人采用了分布式無線充電和手動充電兩種充電方式。這種設計不僅保證了機器人的持續續航能力,還體現了綠色環保的理念。在巡檢過程中,機器人可以根據需要自動返回充電樁進行充電,無需人工干預,大大提高了巡檢工作的連續性和穩定性。

B1-111-A型雙圓管掛軌式巡檢機器人以其獨特的設計、智能的導航、實時的監測、高效的管理和綠色環保的充電方式,成為了狹窄,復雜環境巡檢工作領域的新寵。不僅解決了傳統巡檢方式存在的問題,還推動了巡檢工作的智能化和自動化進程。相信在未來的發展中,B1-111-A型巡檢機器人將發揮更加重要的作用,為工業與基礎設施的安全運行保駕護航。
渠道合作、投融資合作請聯系qsai_robot@qishengrobot.com